前回はマスフローコントローラー(MFC)の応答性に関して、同じ熱式流量センサーでも、巻線型とMEMS型、インサーション型の差を比較してみました。
今回は、MFCを構成する流量センサーと流量制御バルブを制御する調整計の機能に関してお話ししましょう。機器間の関わりは下図を参照ください。
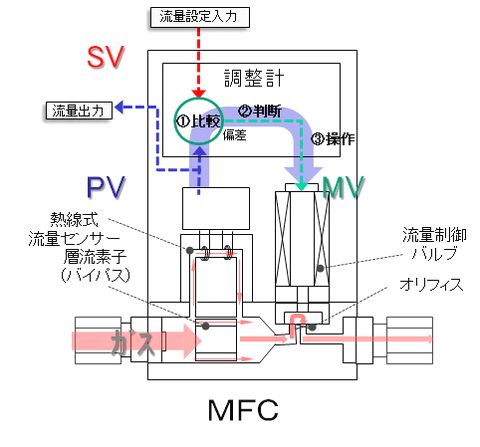
MFCが搭載している調整計は、流量センサーからの流量信号(PV)と外部機器からの流量設定信号(SV)を比較、判断して、流量制御バルブの制御信号(MV)を操作する仕事をしています。
MFCの調整計の用いる制御方法として、PID制御という言葉をよく聞きますね?
ですが、MFCにとってのPID制御という解説にはなかなか適切なものが無いのです。
PIDは大別すると、P動作:Proportional(比例動作) 、I動作:Integral(積分動作)、D動作:Differential(微分動作)のことです。
連載ではP→PI→PIDと順に制御を解説していきますね。
P制御
P制御とは、目標値と現在値との差に比例した操作量を調節する制御方式です。
ある範囲内のMVが、制御対象のPVの変化に応じて0~100%の間を連続的に変化させるように考えられた制御のことです。
ON-OFF制御に比べて、ハンチングの小さい滑らかな制御が可能になります。
SVとPVの差が大きければ加速度を上げてSVに接近させ、PVに近くなると徐々に加速度を下げる制御を行います。
このP制御でうまく制御できると良いのですが、SVにPVが近づくと問題が生じます。
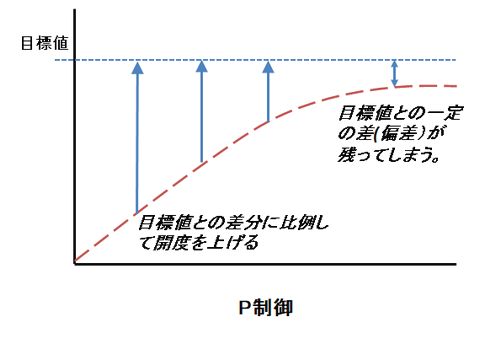
操作量が小さくなりすぎた為に、これ以上細かく制御できない状態になってしまい、目標値にきわめて近い寄り添った状態で安定してしまう現象が起きるのです。
手動操作する場合は、その辺りを上手く微調整して、目標値ピッタリに合わせる事が可能なのですが、調節器を使って電気的にコントロールする場合、目標値との差(偏差)が小さくなりすぎると測定誤差の範囲内に収まってしまうために、これ以上追い込む制御が不可能になってしまうのです。
しかし、MFCではそれは困ります。
SVがフルスケール100SCCMに対して98SCCMでPVが安定した状態は、フルスケールに対して-2%の値で制御を良しとすることであり、通常のMFCに求められる流量制御の要求値からは大きく外れてしまいます。
これでは困るので、解決手段としてPI制御が登場します。
【あなたにMFCの夜が来る~真・MFC千夜一夜物語】by Deco EZ-Japan








